Bayesian Optimization
Contents
Bayesian Optimization#
# Execute once during the start
!git clone https://github.com/cfteach/modules.git
!pip install scikit-optimize
%load_ext autoreload
%autoreload 2
from IPython.display import display, Math, Latex
import os
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
#import AI4NP_detector_opt.sol2.detector2 as detector2
import modules.detector2 as detector2
import re
Create detector geometry and simulate tracks#
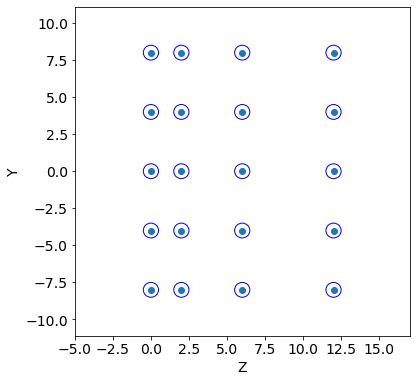
The module detector creates a simple 2D geometry of a wire based tracker made by 4 planes.
The adjustable parameters are the radius of each wire, the pitch (along the y axis), and the shift along y and z of a plane with respect to the previous one.
A total of 8 parameters can be tuned.
The goal of this toy model, is to tune the detector design so to optimize the efficiency (fraction of tracks which are detected) as well as the cost for its realization. As a proxy for the cost, we use the material/volume (the surface in 2D) of the detector. For a track to be detetected, in the efficiency definition we require at least two wires hit by the track.
So we want to maximize the efficiency (defined in detector.py) and minimize the cost.
LIST OF PARAMETERS#
(baseline values)
R = .5 [cm]
pitch = 4.0 [cm]
y1 = 0.0, y2 = 0.0, y3 = 0.0, z1 = 2.0, z2 = 4.0, z3 = 6.0 [cm]
# CONSTANT PARAMETERS
#------ define mother region ------#
y_min=-10.1
y_max=10.1
N_tracks = 1000
print("::::: BASELINE PARAMETERS :::::")
R = 0.5 #.5
pitch = 4.0 #10.0
y1 = 0.0
y2 = 0.0
y3 = 0.0
z1 = 2.0
z2 = 4.0
z3 = 6.0
print("R, pitch, y1, y2, y3, z1, z2, z3: ", R, pitch, y1, y2, y3, z1, z2, z3,"\n")
#------------- GEOMETRY ---------------#
print(":::: INITIAL GEOMETRY ::::")
tr = detector2.Tracker(R, pitch, y1, y2, y3, z1, z2, z3)
Z, Y = tr.create_geometry()
num_wires = detector2.calculate_wires(Y, y_min, y_max)
detector2.geometry_display(Z, Y, R, y_min=y_min, y_max=y_max,block=False,pause=5) #5
print("# of wires: ", num_wires)
#------------- TRACK GENERATION -----------#
print(":::: TRACK GENERATION ::::")
t = detector2.Tracks(b_min= y_min, b_max=y_max, alpha_mean=0, alpha_std=0.2) #b_min=-100, b_max=100
tracks = t.generate(N_tracks)
detector2.geometry_display(Z, Y, R, y_min=y_min, y_max=y_max,block=False, pause=-1)
detector2.tracks_display(tracks, Z,block=False,pause=-1)
#a track is detected if at least two wires have been hit
score = detector2.get_score(Z, Y, tracks, R)
frac_detected = score[0]
print("fraction of tracks detected: ",frac_detected)
::::: BASELINE PARAMETERS :::::
R, pitch, y1, y2, y3, z1, z2, z3: 0.5 4.0 0.0 0.0 0.0 2.0 4.0 6.0
:::: INITIAL GEOMETRY ::::
# of wires: 20
:::: TRACK GENERATION ::::
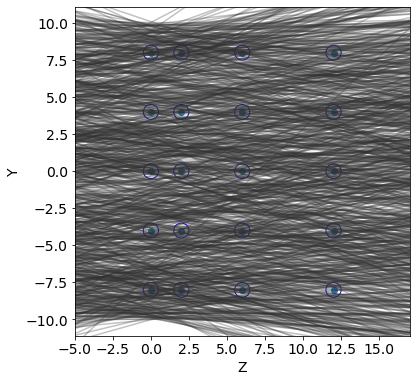
fraction of tracks detected: 0.264
Define Objectives#
Defines the objective function of the problem that can be used in the Bayesian Optimization.
#------------- OBJECTIVE FUNCTION ---------------#
class Obj:
def __init__(self,R=0.5,pitch=4.0):
self.R = R
self.pitch = pitch
def update_pars(self,r,p):
self.R = r
self.pitch = p
def objective(self,x):
#you have to upack R, pitch if included in the BO
y1, y2, y3, z1, z2, z3 = x
Z, Y = detector2.Tracker(self.R, self.pitch, y1, y2, y3, z1, z2, z3).create_geometry()
#a track is detected if at least two wires have been hit
val = detector2.get_score(Z, Y, tracks, self.R)[0]
#print(self.R, self.pitch)
return 1. - val # the smaller, the better.
Bayesian Optimization of the Detector Geometry#
You can find different options for the optimization.
We refer to sklearn optimization package: https://scikit-optimize.github.io/stable/
Different approaches for the regression part.
from skopt import gp_minimize, gbrt_minimize, dummy_minimize
# You can change values within pre-defined ranges
# Below we are considering only the shifts along y and z
# (of each plane with respect to the previous plane)
y1_min, y1_max = [0., 4.]
y2_min, y2_max = [0., 4.]
y3_min, y3_max = [0., 4.]
z1_min, z1_max = [2., 10.]
z2_min, z2_max = [2., 10.]
z3_min, z3_max = [2., 10.]
dims = [(y1_min, y1_max),(y2_min, y2_max), (y3_min, y3_max),
(z1_min, z1_max), (z2_min, z2_max),(z3_min, z3_max)]
ncalls = 100
rand_st = 1717 #for reproducibility
Bayesian Optimization with Gaussian Processes#
obj_fun = Obj()
# https://scikit-optimize.github.io/stable/modules/generated/skopt.gp_minimize.html
res_gp = gp_minimize(
func=obj_fun.objective, # the function to minimize
dimensions=dims, # the bounds on each dimension of x
acq_func="gp_hedge", #"gp_hedge", # the acquisition function EI
n_calls= ncalls, # the number of evaluations of f
n_random_starts=15, # the number of random initialization points
#noise=0.01**2, # the noise level (optional)
random_state=rand_st, # the random seed, use same for reproducibility
#kappa=kappa, # the adjustable parameter of LCB; control variance
#xi = xi, # adjustable parameter of either EI, PI: controls improvement
verbose=False)
Results from BO(GP)#
print("-------------------------------")
print("------RESULT FROM BO(GP)-------")
print("-------------------------------")
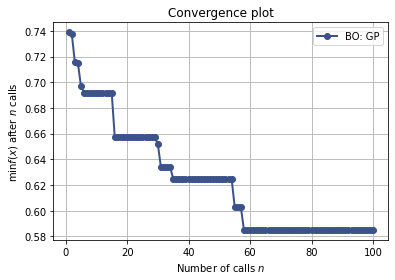
print("Objective optimum = ", res_gp.fun)
print("Best score (efficiency) = ", 1-res_gp.fun)
# get found optimal geometry #R, pitch,
[y1, y2, y3, z1, z2, z3] = res_gp.x
-------------------------------
------RESULT FROM BO(GP)-------
-------------------------------
Objective optimum = 0.5920000000000001
Best score (efficiency) = 0.4079999999999999
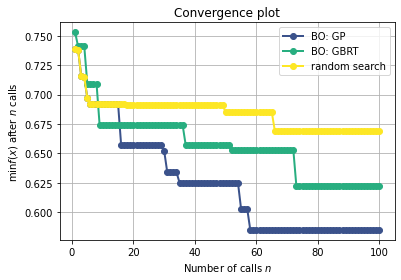
Convergence#
print("....plotting convergence")
from skopt.plots import plot_convergence
plot_convergence(("BO: GP", res_gp))
....plotting convergence
<matplotlib.axes._subplots.AxesSubplot at 0x7f97abdc2850>
Optimal Geometry#
#------------- GEOMETRY ---------------#
print(":::: OPTIMAL GEOMETRY ::::")
tr = detector2.Tracker(R, pitch, y1, y2, y3, z1, z2, z3)
Z, Y = tr.create_geometry()
num_wires = detector2.calculate_wires(Y, y_min, y_max)
print("num_wires: ", num_wires)
detector2.geometry_display(Z, Y, R, y_min=y_min, y_max=y_max,block=False, pause=-1)
detector2.tracks_display(tracks, Z,block=False,pause=-1)
#a track is detected if at least two wires have been hit
score = detector2.get_score(Z, Y, tracks, R)
frac_detected = score[0]
print("fraction of tracks detected: ",frac_detected)
:::: OPTIMAL GEOMETRY ::::
num_wires: 20
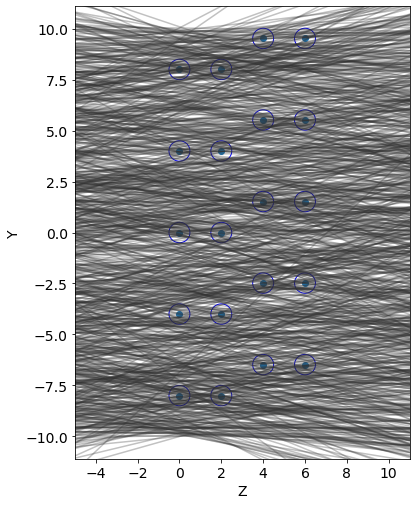
fraction of tracks detected: 0.408
Bayesian Optimization with GBRT#
res_gbrt = gbrt_minimize(
func=obj_fun.objective, # the function to minimize
dimensions=dims, # the bounds on each dimension of x
acq_func="EI", # the acquisition function EI
n_calls= ncalls, # the number of evaluations of f
n_random_starts=15, # the number of random initialization points
random_state=rand_st, # the random seed, use same for reproducibility
#kappa=kappa, # the adjustable parameter of LCB; control variance
#xi = xi, # adjustable parameter of either EI, PI: controls improvement
verbose=False)
print("-------------------------------")
print("-----RESULT FROM BO(GBRT)------")
print("-------------------------------")
print("Objective optimum = ", res_gbrt.fun)
print("Best score = ", 1-res_gbrt.fun)
-------------------------------
-----RESULT FROM BO(GBRT)------
-------------------------------
Objective optimum = 0.61
Best score = 0.39
Random Search#
res_rand = dummy_minimize(
func=obj_fun.objective, # the function to minimize
dimensions=dims, # the bounds on each dimension of x
n_calls= ncalls, # the number of evaluations of f
random_state=rand_st, # the random seed
verbose=False)
print("-------------------------------")
print("------ RESULT FROM RS -------")
print("-------------------------------")
print("Objective optimum = ", res_rand.fun)
print("Best score = ", 1-res_rand.fun)
-------------------------------
------ RESULT FROM RS -------
-------------------------------
Objective optimum = 0.669
Best score = 0.33099999999999996
Visualization of Results#
print("....plotting convergence")
from skopt.plots import plot_convergence
plot_convergence(("BO: GP", res_gp),("BO: GBRT", res_gbrt),("random search", res_rand))
....plotting convergence
<matplotlib.axes._subplots.AxesSubplot at 0x7f97a8d06550>
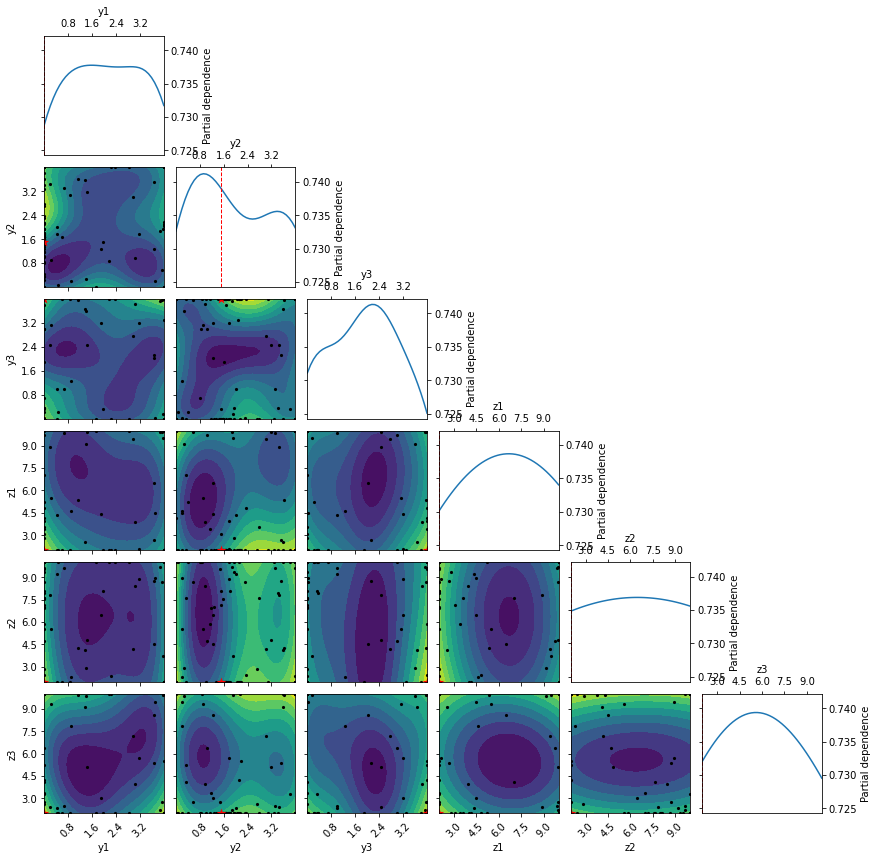
list_str = ["y1", "y2", "y3", "z1", "z2", "z3"] #----"R", "pitch"
from skopt.plots import plot_objective
_ = plot_objective(res_gp,dimensions=list_str)
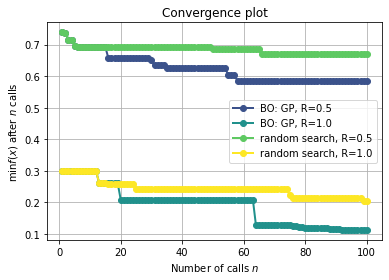
Solution 1#
Increase radius to 1.0 and compare convergence plots of GP and RS with before.
R, pitch = 1.0, 4.0 #to update final plot of optimal geometry
obj_fun.update_pars(R, pitch)
res_gp_largeR = gp_minimize(
func=obj_fun.objective, # the function to minimize
dimensions=dims, # the bounds on each dimension of x
acq_func="gp_hedge", #"gp_hedge", # the acquisition function EI
n_calls= ncalls, # the number of evaluations of f
n_random_starts=15, # the number of random initialization points
random_state=rand_st, # the random seed, use same for reproducibility
verbose=False)
print("-------------------------------")
print("------ RESULT FROM GP -------")
print("-------------------------------")
print("Objective optimum = ", res_gp_largeR.fun)
print("Best score = ", 1-res_gp_largeR.fun)
-------------------------------
------ RESULT FROM GP -------
-------------------------------
Objective optimum = 0.11299999999999999
Best score = 0.887
res_rand_largeR = dummy_minimize(
func=obj_fun.objective, # the function to minimize
dimensions=dims, # the bounds on each dimension of x
n_calls= ncalls, # the number of evaluations of f
random_state=rand_st, # the random seed
verbose=False)
print("-------------------------------")
print("------ RESULT FROM RS -------")
print("-------------------------------")
print("Objective optimum = ", res_rand_largeR.fun)
print("Best score = ", 1-res_rand_largeR.fun)
-------------------------------
------ RESULT FROM RS -------
-------------------------------
Objective optimum = 0.20399999999999996
Best score = 0.796
print("....plotting convergence")
from skopt.plots import plot_convergence
plot_convergence(("BO: GP, R=0.5", res_gp),("BO: GP, R=1.0", res_gp_largeR),("random search, R=0.5", res_rand),("random search, R=1.0", res_rand_largeR))
....plotting convergence
<matplotlib.axes._subplots.AxesSubplot at 0x7f97bae49090>
print(res_gp_largeR.fun)
print(res_gp.fun)
0.11299999999999999
0.5920000000000001
[y1, y2, y3, z1, z2, z3] = res_gp_largeR.x
#------------- GEOMETRY ---------------#
print(":::: OPTIMAL GEOMETRY ::::")
tr = detector2.Tracker(R, pitch, y1, y2, y3, z1, z2, z3)
Z, Y = tr.create_geometry()
num_wires = detector2.calculate_wires(Y, y_min, y_max)
print("num_wires: ", num_wires)
detector2.geometry_display(Z, Y, R, y_min=y_min, y_max=y_max,block=False, pause=-1)
detector2.tracks_display(tracks, Z,block=False,pause=-1)
#a track is detected if at least two wires have been hit
score = detector2.get_score(Z, Y, tracks, R)
frac_detected = score[0]
print("fraction of tracks detected: ",frac_detected)
:::: OPTIMAL GEOMETRY ::::
num_wires: 21

fraction of tracks detected: 0.887