(Tut 2 - part a) AI-assisted design with MOEA
Contents
(Tut 2 - part a) AI-assisted design with MOEA#
MOEA#
This section is an example for MultiObjective Optimization using Evolutionary Algorithm
!wget https://raw.githubusercontent.com/cfteach/modules/master/detector2.py
!pip install pymoo
!pip install plotly
!pip install ipyvolume
!pip install altair
--2023-06-14 15:45:04-- https://raw.githubusercontent.com/cfteach/modules/master/detector2.py
Resolving raw.githubusercontent.com (raw.githubusercontent.com)... 185.199.110.133, 185.199.109.133, 185.199.108.133, ...
Connecting to raw.githubusercontent.com (raw.githubusercontent.com)|185.199.110.133|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 7976 (7.8K) [text/plain]
Saving to: ‘detector2.py’
detector2.py 0%[ ] 0 --.-KB/s
detector2.py 100%[===================>] 7.79K --.-KB/s in 0s
2023-06-14 15:45:04 (55.4 MB/s) - ‘detector2.py’ saved [7976/7976]
Looking in indexes: https://pypi.org/simple, https://us-python.pkg.dev/colab-wheels/public/simple/
Collecting pymoo
Downloading pymoo-0.6.0.1-cp310-cp310-manylinux_2_5_x86_64.manylinux1_x86_64.manylinux_2_12_x86_64.manylinux2010_x86_64.whl (2.5 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 2.5/2.5 MB 18.4 MB/s eta 0:00:00
?25hRequirement already satisfied: numpy>=1.15 in /usr/local/lib/python3.10/dist-packages (from pymoo) (1.22.4)
Requirement already satisfied: scipy>=1.1 in /usr/local/lib/python3.10/dist-packages (from pymoo) (1.10.1)
Requirement already satisfied: matplotlib>=3 in /usr/local/lib/python3.10/dist-packages (from pymoo) (3.7.1)
Requirement already satisfied: autograd>=1.4 in /usr/local/lib/python3.10/dist-packages (from pymoo) (1.5)
Collecting cma==3.2.2 (from pymoo)
Downloading cma-3.2.2-py2.py3-none-any.whl (249 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 249.1/249.1 kB 24.4 MB/s eta 0:00:00
?25hCollecting alive-progress (from pymoo)
Downloading alive_progress-3.1.4-py3-none-any.whl (75 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 75.9/75.9 kB 9.1 MB/s eta 0:00:00
?25hCollecting dill (from pymoo)
Downloading dill-0.3.6-py3-none-any.whl (110 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 110.5/110.5 kB 13.0 MB/s eta 0:00:00
?25hCollecting Deprecated (from pymoo)
Downloading Deprecated-1.2.14-py2.py3-none-any.whl (9.6 kB)
Requirement already satisfied: future>=0.15.2 in /usr/local/lib/python3.10/dist-packages (from autograd>=1.4->pymoo) (0.18.3)
Requirement already satisfied: contourpy>=1.0.1 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (1.0.7)
Requirement already satisfied: cycler>=0.10 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (0.11.0)
Requirement already satisfied: fonttools>=4.22.0 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (4.39.3)
Requirement already satisfied: kiwisolver>=1.0.1 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (1.4.4)
Requirement already satisfied: packaging>=20.0 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (23.1)
Requirement already satisfied: pillow>=6.2.0 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (8.4.0)
Requirement already satisfied: pyparsing>=2.3.1 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (3.0.9)
Requirement already satisfied: python-dateutil>=2.7 in /usr/local/lib/python3.10/dist-packages (from matplotlib>=3->pymoo) (2.8.2)
Collecting about-time==4.2.1 (from alive-progress->pymoo)
Downloading about_time-4.2.1-py3-none-any.whl (13 kB)
Collecting grapheme==0.6.0 (from alive-progress->pymoo)
Downloading grapheme-0.6.0.tar.gz (207 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 207.3/207.3 kB 19.4 MB/s eta 0:00:00
?25h Preparing metadata (setup.py) ... ?25l?25hdone
Requirement already satisfied: wrapt<2,>=1.10 in /usr/local/lib/python3.10/dist-packages (from Deprecated->pymoo) (1.14.1)
Requirement already satisfied: six>=1.5 in /usr/local/lib/python3.10/dist-packages (from python-dateutil>=2.7->matplotlib>=3->pymoo) (1.16.0)
Building wheels for collected packages: grapheme
Building wheel for grapheme (setup.py) ... ?25l?25hdone
Created wheel for grapheme: filename=grapheme-0.6.0-py3-none-any.whl size=210079 sha256=bfeb4b7863e5a19b8f4cd1a88fdfe2a537254abc28f5c4cdff09cf5ea27b831b
Stored in directory: /root/.cache/pip/wheels/01/e1/49/37e6bde9886439057450c494a79b0bef8bbe897a54aebfc757
Successfully built grapheme
Installing collected packages: grapheme, dill, Deprecated, cma, about-time, alive-progress, pymoo
Successfully installed Deprecated-1.2.14 about-time-4.2.1 alive-progress-3.1.4 cma-3.2.2 dill-0.3.6 grapheme-0.6.0 pymoo-0.6.0.1
Looking in indexes: https://pypi.org/simple, https://us-python.pkg.dev/colab-wheels/public/simple/
Requirement already satisfied: plotly in /usr/local/lib/python3.10/dist-packages (5.13.1)
Requirement already satisfied: tenacity>=6.2.0 in /usr/local/lib/python3.10/dist-packages (from plotly) (8.2.2)
Looking in indexes: https://pypi.org/simple, https://us-python.pkg.dev/colab-wheels/public/simple/
Collecting ipyvolume
Downloading ipyvolume-0.6.3-py3-none-any.whl (1.6 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 1.6/1.6 MB 19.3 MB/s eta 0:00:00
?25hRequirement already satisfied: ipywidgets>=7.0.0 in /usr/local/lib/python3.10/dist-packages (from ipyvolume) (7.7.1)
Collecting bqplot (from ipyvolume)
Downloading bqplot-0.12.39-py2.py3-none-any.whl (1.2 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 1.2/1.2 MB 69.2 MB/s eta 0:00:00
?25hRequirement already satisfied: numpy in /usr/local/lib/python3.10/dist-packages (from ipyvolume) (1.22.4)
Collecting traittypes (from ipyvolume)
Downloading traittypes-0.2.1-py2.py3-none-any.whl (8.6 kB)
Requirement already satisfied: traitlets in /usr/local/lib/python3.10/dist-packages (from ipyvolume) (5.7.1)
Requirement already satisfied: Pillow in /usr/local/lib/python3.10/dist-packages (from ipyvolume) (8.4.0)
Collecting ipywebrtc (from ipyvolume)
Downloading ipywebrtc-0.6.0-py2.py3-none-any.whl (260 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 260.7/260.7 kB 22.6 MB/s eta 0:00:00
?25hRequirement already satisfied: requests in /usr/local/lib/python3.10/dist-packages (from ipyvolume) (2.27.1)
Collecting ipyvuetify (from ipyvolume)
Downloading ipyvuetify-1.8.10-py2.py3-none-any.whl (11.7 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 11.7/11.7 MB 73.4 MB/s eta 0:00:00
?25hCollecting ipyvue>=1.7.0 (from ipyvolume)
Downloading ipyvue-1.9.1-py2.py3-none-any.whl (2.7 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 2.7/2.7 MB 71.7 MB/s eta 0:00:00
?25hCollecting pythreejs>=2.4.0 (from ipyvolume)
Downloading pythreejs-2.4.2-py3-none-any.whl (3.4 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 3.4/3.4 MB 45.2 MB/s eta 0:00:00
?25hRequirement already satisfied: matplotlib in /usr/local/lib/python3.10/dist-packages (from ipyvolume) (3.7.1)
Requirement already satisfied: ipykernel>=4.5.1 in /usr/local/lib/python3.10/dist-packages (from ipywidgets>=7.0.0->ipyvolume) (5.5.6)
Requirement already satisfied: ipython-genutils~=0.2.0 in /usr/local/lib/python3.10/dist-packages (from ipywidgets>=7.0.0->ipyvolume) (0.2.0)
Requirement already satisfied: widgetsnbextension~=3.6.0 in /usr/local/lib/python3.10/dist-packages (from ipywidgets>=7.0.0->ipyvolume) (3.6.4)
Requirement already satisfied: ipython>=4.0.0 in /usr/local/lib/python3.10/dist-packages (from ipywidgets>=7.0.0->ipyvolume) (7.34.0)
Requirement already satisfied: jupyterlab-widgets>=1.0.0 in /usr/local/lib/python3.10/dist-packages (from ipywidgets>=7.0.0->ipyvolume) (3.0.7)
Collecting ipydatawidgets>=1.1.1 (from pythreejs>=2.4.0->ipyvolume)
Downloading ipydatawidgets-4.3.5-py2.py3-none-any.whl (271 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 271.7/271.7 kB 21.5 MB/s eta 0:00:00
?25hRequirement already satisfied: pandas<3.0.0,>=1.0.0 in /usr/local/lib/python3.10/dist-packages (from bqplot->ipyvolume) (1.5.3)
Requirement already satisfied: contourpy>=1.0.1 in /usr/local/lib/python3.10/dist-packages (from matplotlib->ipyvolume) (1.0.7)
Requirement already satisfied: cycler>=0.10 in /usr/local/lib/python3.10/dist-packages (from matplotlib->ipyvolume) (0.11.0)
Requirement already satisfied: fonttools>=4.22.0 in /usr/local/lib/python3.10/dist-packages (from matplotlib->ipyvolume) (4.39.3)
Requirement already satisfied: kiwisolver>=1.0.1 in /usr/local/lib/python3.10/dist-packages (from matplotlib->ipyvolume) (1.4.4)
Requirement already satisfied: packaging>=20.0 in /usr/local/lib/python3.10/dist-packages (from matplotlib->ipyvolume) (23.1)
Requirement already satisfied: pyparsing>=2.3.1 in /usr/local/lib/python3.10/dist-packages (from matplotlib->ipyvolume) (3.0.9)
Requirement already satisfied: python-dateutil>=2.7 in /usr/local/lib/python3.10/dist-packages (from matplotlib->ipyvolume) (2.8.2)
Requirement already satisfied: urllib3<1.27,>=1.21.1 in /usr/local/lib/python3.10/dist-packages (from requests->ipyvolume) (1.26.15)
Requirement already satisfied: certifi>=2017.4.17 in /usr/local/lib/python3.10/dist-packages (from requests->ipyvolume) (2022.12.7)
Requirement already satisfied: charset-normalizer~=2.0.0 in /usr/local/lib/python3.10/dist-packages (from requests->ipyvolume) (2.0.12)
Requirement already satisfied: idna<4,>=2.5 in /usr/local/lib/python3.10/dist-packages (from requests->ipyvolume) (3.4)
Requirement already satisfied: jupyter-client in /usr/local/lib/python3.10/dist-packages (from ipykernel>=4.5.1->ipywidgets>=7.0.0->ipyvolume) (6.1.12)
Requirement already satisfied: tornado>=4.2 in /usr/local/lib/python3.10/dist-packages (from ipykernel>=4.5.1->ipywidgets>=7.0.0->ipyvolume) (6.3.1)
Requirement already satisfied: setuptools>=18.5 in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (67.7.2)
Collecting jedi>=0.16 (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume)
Downloading jedi-0.18.2-py2.py3-none-any.whl (1.6 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 1.6/1.6 MB 59.5 MB/s eta 0:00:00
?25hRequirement already satisfied: decorator in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (4.4.2)
Requirement already satisfied: pickleshare in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (0.7.5)
Requirement already satisfied: prompt-toolkit!=3.0.0,!=3.0.1,<3.1.0,>=2.0.0 in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (3.0.38)
Requirement already satisfied: pygments in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (2.14.0)
Requirement already satisfied: backcall in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (0.2.0)
Requirement already satisfied: matplotlib-inline in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (0.1.6)
Requirement already satisfied: pexpect>4.3 in /usr/local/lib/python3.10/dist-packages (from ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (4.8.0)
Requirement already satisfied: pytz>=2020.1 in /usr/local/lib/python3.10/dist-packages (from pandas<3.0.0,>=1.0.0->bqplot->ipyvolume) (2022.7.1)
Requirement already satisfied: six>=1.5 in /usr/local/lib/python3.10/dist-packages (from python-dateutil>=2.7->matplotlib->ipyvolume) (1.16.0)
Requirement already satisfied: notebook>=4.4.1 in /usr/local/lib/python3.10/dist-packages (from widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (6.4.8)
Requirement already satisfied: parso<0.9.0,>=0.8.0 in /usr/local/lib/python3.10/dist-packages (from jedi>=0.16->ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (0.8.3)
Requirement already satisfied: jinja2 in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (3.1.2)
Requirement already satisfied: pyzmq>=17 in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (23.2.1)
Requirement already satisfied: argon2-cffi in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (21.3.0)
Requirement already satisfied: jupyter-core>=4.6.1 in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (5.3.0)
Requirement already satisfied: nbformat in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (5.8.0)
Requirement already satisfied: nbconvert in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (6.5.4)
Requirement already satisfied: nest-asyncio>=1.5 in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (1.5.6)
Requirement already satisfied: Send2Trash>=1.8.0 in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (1.8.0)
Requirement already satisfied: terminado>=0.8.3 in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.17.1)
Requirement already satisfied: prometheus-client in /usr/local/lib/python3.10/dist-packages (from notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.16.0)
Requirement already satisfied: ptyprocess>=0.5 in /usr/local/lib/python3.10/dist-packages (from pexpect>4.3->ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (0.7.0)
Requirement already satisfied: wcwidth in /usr/local/lib/python3.10/dist-packages (from prompt-toolkit!=3.0.0,!=3.0.1,<3.1.0,>=2.0.0->ipython>=4.0.0->ipywidgets>=7.0.0->ipyvolume) (0.2.6)
Requirement already satisfied: platformdirs>=2.5 in /usr/local/lib/python3.10/dist-packages (from jupyter-core>=4.6.1->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (3.3.0)
Requirement already satisfied: argon2-cffi-bindings in /usr/local/lib/python3.10/dist-packages (from argon2-cffi->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (21.2.0)
Requirement already satisfied: MarkupSafe>=2.0 in /usr/local/lib/python3.10/dist-packages (from jinja2->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (2.1.2)
Requirement already satisfied: lxml in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (4.9.2)
Requirement already satisfied: beautifulsoup4 in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (4.11.2)
Requirement already satisfied: bleach in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (6.0.0)
Requirement already satisfied: defusedxml in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.7.1)
Requirement already satisfied: entrypoints>=0.2.2 in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.4)
Requirement already satisfied: jupyterlab-pygments in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.2.2)
Requirement already satisfied: mistune<2,>=0.8.1 in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.8.4)
Requirement already satisfied: nbclient>=0.5.0 in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.7.4)
Requirement already satisfied: pandocfilters>=1.4.1 in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (1.5.0)
Requirement already satisfied: tinycss2 in /usr/local/lib/python3.10/dist-packages (from nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (1.2.1)
Requirement already satisfied: fastjsonschema in /usr/local/lib/python3.10/dist-packages (from nbformat->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (2.16.3)
Requirement already satisfied: jsonschema>=2.6 in /usr/local/lib/python3.10/dist-packages (from nbformat->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (4.3.3)
Requirement already satisfied: attrs>=17.4.0 in /usr/local/lib/python3.10/dist-packages (from jsonschema>=2.6->nbformat->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (23.1.0)
Requirement already satisfied: pyrsistent!=0.17.0,!=0.17.1,!=0.17.2,>=0.14.0 in /usr/local/lib/python3.10/dist-packages (from jsonschema>=2.6->nbformat->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.19.3)
Requirement already satisfied: cffi>=1.0.1 in /usr/local/lib/python3.10/dist-packages (from argon2-cffi-bindings->argon2-cffi->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (1.15.1)
Requirement already satisfied: soupsieve>1.2 in /usr/local/lib/python3.10/dist-packages (from beautifulsoup4->nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (2.4.1)
Requirement already satisfied: webencodings in /usr/local/lib/python3.10/dist-packages (from bleach->nbconvert->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (0.5.1)
Requirement already satisfied: pycparser in /usr/local/lib/python3.10/dist-packages (from cffi>=1.0.1->argon2-cffi-bindings->argon2-cffi->notebook>=4.4.1->widgetsnbextension~=3.6.0->ipywidgets>=7.0.0->ipyvolume) (2.21)
Installing collected packages: ipywebrtc, traittypes, jedi, ipyvue, ipydatawidgets, bqplot, pythreejs, ipyvuetify, ipyvolume
Successfully installed bqplot-0.12.39 ipydatawidgets-4.3.5 ipyvolume-0.6.3 ipyvue-1.9.1 ipyvuetify-1.8.10 ipywebrtc-0.6.0 jedi-0.18.2 pythreejs-2.4.2 traittypes-0.2.1
Looking in indexes: https://pypi.org/simple, https://us-python.pkg.dev/colab-wheels/public/simple/
Requirement already satisfied: altair in /usr/local/lib/python3.10/dist-packages (4.2.2)
Requirement already satisfied: entrypoints in /usr/local/lib/python3.10/dist-packages (from altair) (0.4)
Requirement already satisfied: jinja2 in /usr/local/lib/python3.10/dist-packages (from altair) (3.1.2)
Requirement already satisfied: jsonschema>=3.0 in /usr/local/lib/python3.10/dist-packages (from altair) (4.3.3)
Requirement already satisfied: numpy in /usr/local/lib/python3.10/dist-packages (from altair) (1.22.4)
Requirement already satisfied: pandas>=0.18 in /usr/local/lib/python3.10/dist-packages (from altair) (1.5.3)
Requirement already satisfied: toolz in /usr/local/lib/python3.10/dist-packages (from altair) (0.12.0)
Requirement already satisfied: attrs>=17.4.0 in /usr/local/lib/python3.10/dist-packages (from jsonschema>=3.0->altair) (23.1.0)
Requirement already satisfied: pyrsistent!=0.17.0,!=0.17.1,!=0.17.2,>=0.14.0 in /usr/local/lib/python3.10/dist-packages (from jsonschema>=3.0->altair) (0.19.3)
Requirement already satisfied: python-dateutil>=2.8.1 in /usr/local/lib/python3.10/dist-packages (from pandas>=0.18->altair) (2.8.2)
Requirement already satisfied: pytz>=2020.1 in /usr/local/lib/python3.10/dist-packages (from pandas>=0.18->altair) (2022.7.1)
Requirement already satisfied: MarkupSafe>=2.0 in /usr/local/lib/python3.10/dist-packages (from jinja2->altair) (2.1.2)
Requirement already satisfied: six>=1.5 in /usr/local/lib/python3.10/dist-packages (from python-dateutil>=2.8.1->pandas>=0.18->altair) (1.16.0)
%load_ext autoreload
%autoreload 2
import ipyvolume as ipv
import ipywidgets as widgets
from IPython.display import display, Math, Latex
import os
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
#import AI4NP_detector_opt.sol2.detector2 as detector2
import detector2
import re
import pickle
import dill
from pymoo.algorithms.moo.nsga2 import NSGA2
from pymoo.core.problem import Problem
from pymoo.optimize import minimize
from pymoo.visualization.scatter import Scatter
from pymoo.factory import get_visualization #, get_decomposition
#from pymoo.util.display import Display
from pymoo.util.display.column import Column
from pymoo.util.display.output import Output
from pymoo.factory import get_performance_indicator
from pymoo.factory import get_decision_making, get_reference_directions
from pymoo.util.nds.non_dominated_sorting import NonDominatedSorting
The autoreload extension is already loaded. To reload it, use:
%reload_ext autoreload
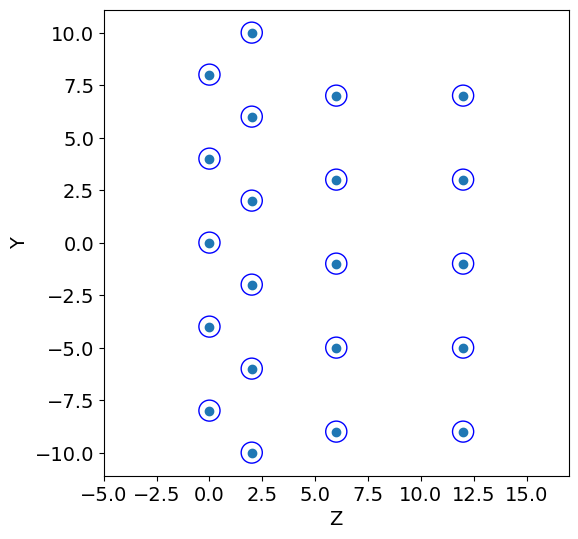
Create detector geometry and simulate tracks#
The module detector creates a simple 2D geometry of a wire based tracker made by 4 planes.
The adjustable parameters are the radius of each wire, the pitch (along the y axis), and the shift along y and z of a plane with respect to the previous one.
A total of 8 parameters can be tuned.
The goal of this toy model, is to tune the detector design so to optimize the efficiency (fraction of tracks which are detected) as well as the cost for its realization. As a proxy for the cost, we use the material/volume (the surface in 2D) of the detector. For a track to be detetected, in the efficiency definition we require at least two wires hit by the track.
So we want to maximize the efficiency (defined in detector.py) and minimize the cost.
LIST OF PARAMETERS#
(baseline values)
R = .5 [cm]
pitch = 4.0 [cm]
y1 = 0.0, y2 = 0.0, y3 = 0.0, z1 = 2.0, z2 = 4.0, z3 = 6.0 [cm]
# CONSTANT PARAMETERS
#------ define mother region ------#
y_min=-10.1
y_max=10.1
N_tracks = 1000
print("::::: BASELINE PARAMETERS :::::")
R = 0.5
pitch = 4.0
y1 = 2.0
y2 = 1.0
y3 = 0.0
z1 = 2.0
z2 = 4.0
z3 = 6.0
print("R, pitch, y1, y2, y3, z1, z2, z3: ", R, pitch, y1, y2, y3, z1, z2, z3,"\n")
#------------- GEOMETRY ---------------#
print(":::: INITIAL GEOMETRY ::::")
tr = detector2.Tracker(R, pitch, y1, y2, y3, z1, z2, z3)
Z, Y = tr.create_geometry()
num_wires = detector2.calculate_wires(Y, y_min, y_max)
volume = detector2.wires_volume(Y, y_min, y_max,R)
detector2.geometry_display(Z, Y, R, y_min=y_min, y_max=y_max,block=False,pause=5) #5
print("# of wires: ", num_wires, ", volume: ", volume)
#------------- TRACK GENERATION -----------#
print(":::: TRACK GENERATION ::::")
t = detector2.Tracks(b_min=y_min, b_max=y_max, alpha_mean=0, alpha_std=0.2)
tracks = t.generate(N_tracks)
detector2.geometry_display(Z, Y, R, y_min=y_min, y_max=y_max,block=False, pause=-1)
detector2.tracks_display(tracks, Z,block=False,pause=-1)
#a track is detected if at least two wires have been hit
score = detector2.get_score(Z, Y, tracks, R)
frac_detected = score[0]
resolution = score[1]
print("fraction of tracks detected: ",frac_detected)
print("resolution: ",resolution)
::::: BASELINE PARAMETERS :::::
R, pitch, y1, y2, y3, z1, z2, z3: 0.5 4.0 2.0 1.0 0.0 2.0 4.0 6.0
:::: INITIAL GEOMETRY ::::
# of wires: 21 , volume: 65.94
:::: TRACK GENERATION ::::
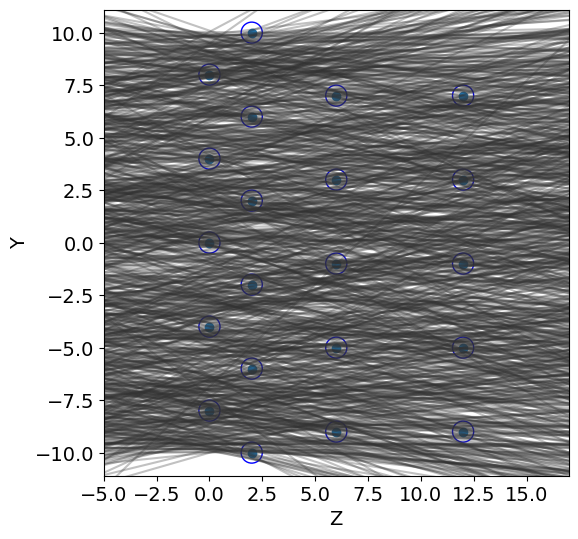
fraction of tracks detected: 0.243
resolution: 0.23594329069824552
Define Objectives#
Defines a class for the objectives of the problem that can be used in the MOO.
class objectives():
def __init__(self,tracks,y_min,y_max):
self.tracks = tracks
self.y_min = y_min
self.y_max = y_max
def wrapper_geometry(fun):
def inner(self):
R, pitch, y1, y2, y3, z1, z2, z3 = self.X
self.geometry(R, pitch, y1, y2, y3, z1, z2, z3)
return fun(self)
return inner
def update_tracks(self, new_tracks):
self.tracks = new_tracks
def update_design_point(self,X):
self.X = X
def geometry(self,R, pitch, y1, y2, y3, z1, z2, z3):
tr = detector2.Tracker(R, pitch, y1, y2, y3, z1, z2, z3)
self.R = R
self.Z, self.Y = tr.create_geometry()
@wrapper_geometry
def calc_score(self):
res = detector2.get_score(self.Z, self.Y, self.tracks, self.R)
assert res[0] >= 0 and res[1] >= 0,"Fraction or Resolution negative."
return res
def get_score(self,X):
R, pitch, y1, y2, y3, z1, z2, z3 = X
self.geometry(R, pitch, y1, y2, y3, z1, z2, z3)
res = detector2.get_score(self.Z, self.Y, self.tracks, self.R)
return res
def get_volume(self):
volume = detector2.wires_volume(self.Y, self.y_min, self.y_max,self.R)
return volume
res = objectives(tracks,y_min,y_max)
#res.geometry(R, pitch, y1, y2, y3, z1, z2, z3)
X = R, pitch, y1, y2, y3, z1, z2, z3
#fscore = res.get_score(X)
res.update_design_point(X)
fscore = res.calc_score()[0]
fvolume = res.get_volume()
print("...check: ", fvolume, fscore)
...check: 65.94 0.243
Multi-Objective Optimization#
We will be using pymoo (https://pymoo.org/getting_started.html).
In the constructor method we specify number of variables N, objectives M, and constraint functions, as well as the lower and upper boundaries of each variable. In our toy model, these boundaries are taken in such a way that all solutions are feasible and no constraint function is needed. You can try to change this and introduce some constraint.
The _evaluate method takes a one-dimensional NumPy array x number of entries equal to n_var. This behavior is enabled by setting elementwise_evaluation=True while calling the super() method.
Notice that every function is minimized. Our efficiency is defined as an tracking inefficiency = 1 - efficiency
We add the resolution as a third objective. The average residual of the track hit from the wire centre is used as a proxy for the resolution for this toy-model
from pymoo.core.problem import ElementwiseProblem
class MyProblem(ElementwiseProblem):
#--------- vectorized ---------#
def __init__(self):
super().__init__(n_var=8,
n_obj=3, #<------------
n_constr=0,
xl=np.array([0.5,2.5,0.,0.,0.,2.,2.,2.]),
xu=np.array([1.0,5.0,4.,4.,4.,10.,10.,10.]))
def _evaluate(self, x, out, *args, **kwargs):
f1 = 1.-res.get_score(x)[0] # efficiency
f2 = res.get_volume() # volume
f3 = res.get_score(x)[1] #resolution
out["F"] = [f1, f2, f3]
Creation of Problem and choice of optimization algorithm.#
We will use NSGA-II, as explained in the lectures. You can decide the population size and the number of offsprings, based on what we discussed.
Pymoo offers different algorithms that can be used which are highly customizable and can be easily extended. https://pymoo.org/algorithms/index.html
Before dealing with a problem, it’s useful to compare with a list of test problems reported in https://pymoo.org/problems/index.html, where different scenarios in terms of Variables, Objectives, Constraints are described.
problem = MyProblem()
algorithm = NSGA2(pop_size=100,n_offsprings=20) #n_offsprings=10
res = minimize(problem,
algorithm,
("n_gen", 500),
verbose=True,
seed=1,
save_history=True)
==========================================================
n_gen | n_eval | n_nds | eps | indicator
==========================================================
1 | 100 | 18 | - | -
2 | 120 | 16 | 0.0303189989 | f
3 | 140 | 23 | 0.0540582311 | nadir
4 | 160 | 28 | 0.0080526494 | f
5 | 180 | 28 | 0.0014589760 | f
6 | 200 | 30 | 0.0093351048 | ideal
7 | 220 | 32 | 0.0631001372 | ideal
8 | 240 | 31 | 0.0150500440 | ideal
9 | 260 | 31 | 0.0250434041 | nadir
10 | 280 | 36 | 0.0027359781 | ideal
11 | 300 | 42 | 0.0076222677 | f
12 | 320 | 44 | 0.0060434951 | ideal
13 | 340 | 48 | 0.0046069968 | nadir
14 | 360 | 52 | 0.0054421769 | ideal
15 | 380 | 53 | 0.0251046025 | nadir
16 | 400 | 54 | 0.0027544528 | f
17 | 420 | 58 | 0.0027816412 | ideal
18 | 440 | 63 | 0.0329490648 | ideal
19 | 460 | 66 | 0.0283783784 | ideal
20 | 480 | 73 | 0.0224570674 | ideal
21 | 500 | 73 | 0.0019421498 | f
22 | 520 | 68 | 0.0036241484 | f
23 | 540 | 74 | 0.0370204384 | nadir
24 | 560 | 67 | 0.0180057434 | nadir
25 | 580 | 70 | 0.0169491525 | ideal
26 | 600 | 70 | 0.0016470688 | f
27 | 620 | 77 | 0.0031819257 | f
28 | 640 | 80 | 0.0013290412 | f
29 | 660 | 88 | 0.0115979381 | nadir
30 | 680 | 82 | 0.0024003395 | f
31 | 700 | 86 | 0.0034382915 | f
32 | 720 | 83 | 0.0028669424 | f
33 | 740 | 82 | 0.0027326566 | f
34 | 760 | 86 | 0.0015396233 | f
35 | 780 | 85 | 0.0023771709 | f
36 | 800 | 91 | 0.0055425223 | f
37 | 820 | 90 | 0.0346303234 | nadir
38 | 840 | 95 | 0.0012312059 | f
39 | 860 | 100 | 0.0023053499 | f
40 | 880 | 100 | 0.0358726033 | nadir
41 | 900 | 100 | 0.0005409685 | f
42 | 920 | 98 | 0.0104166667 | nadir
43 | 940 | 99 | 0.0010798928 | f
44 | 960 | 100 | 0.0105623452 | nadir
45 | 980 | 100 | 0.0009999934 | f
46 | 1000 | 100 | 0.0013159659 | f
47 | 1020 | 100 | 0.0031293685 | f
48 | 1040 | 99 | 0.0730010048 | nadir
49 | 1060 | 100 | 0.0021192746 | f
50 | 1080 | 100 | 0.0035042832 | f
51 | 1100 | 100 | 0.0020713961 | f
52 | 1120 | 100 | 0.0032074560 | f
53 | 1140 | 100 | 0.0010195352 | f
54 | 1160 | 100 | 0.0014179358 | f
55 | 1180 | 100 | 0.0030172055 | f
56 | 1200 | 100 | 0.0166240409 | nadir
57 | 1220 | 100 | 0.0019572448 | f
58 | 1240 | 100 | 0.0023781100 | f
59 | 1260 | 100 | 0.0507338498 | nadir
60 | 1280 | 100 | 0.0182291667 | nadir
61 | 1300 | 100 | 0.0012414074 | f
62 | 1320 | 100 | 0.0014122545 | f
63 | 1340 | 97 | 0.0017297831 | f
64 | 1360 | 100 | 0.0558259356 | nadir
65 | 1380 | 100 | 0.0009082571 | f
66 | 1400 | 100 | 0.0316158016 | nadir
67 | 1420 | 100 | 0.0011466478 | f
68 | 1440 | 100 | 0.0016866413 | f
69 | 1460 | 100 | 0.0038910506 | ideal
70 | 1480 | 100 | 0.0002506049 | f
71 | 1500 | 100 | 0.0006687342 | f
72 | 1520 | 100 | 0.0015675267 | f
73 | 1540 | 100 | 0.0029567071 | f
74 | 1560 | 100 | 0.0007253434 | f
75 | 1580 | 98 | 0.0157594185 | ideal
76 | 1600 | 100 | 0.0010300132 | f
77 | 1620 | 100 | 0.0017175677 | f
78 | 1640 | 100 | 0.0027705912 | f
79 | 1660 | 95 | 0.0021199557 | f
80 | 1680 | 98 | 0.0161822999 | nadir
81 | 1700 | 98 | 0.0011450591 | f
82 | 1720 | 100 | 0.0027697180 | f
83 | 1740 | 100 | 0.0009880818 | f
84 | 1760 | 100 | 0.0023639014 | f
85 | 1780 | 100 | 0.0028080752 | f
86 | 1800 | 100 | 0.0014396014 | f
87 | 1820 | 100 | 0.0024772976 | f
88 | 1840 | 100 | 0.0032238254 | f
89 | 1860 | 100 | 0.0009297475 | f
90 | 1880 | 100 | 0.0021259969 | f
91 | 1900 | 100 | 0.0029526869 | f
92 | 1920 | 100 | 0.0006003235 | f
93 | 1940 | 100 | 0.0027961928 | f
94 | 1960 | 100 | 0.0007189946 | f
95 | 1980 | 100 | 0.0022355053 | f
96 | 2000 | 100 | 0.0038659794 | ideal
97 | 2020 | 100 | 0.0013131772 | f
98 | 2040 | 100 | 0.0018557844 | f
99 | 2060 | 100 | 0.0028751836 | f
100 | 2080 | 100 | 0.0005424324 | f
101 | 2100 | 100 | 0.0021248553 | f
102 | 2120 | 100 | 0.0025897701 | f
103 | 2140 | 100 | 0.0012109270 | f
104 | 2160 | 100 | 0.0020919436 | f
105 | 2180 | 100 | 0.1040759613 | nadir
106 | 2200 | 100 | 0.0006479273 | f
107 | 2220 | 100 | 0.0019277916 | f
108 | 2240 | 100 | 0.0023960677 | f
109 | 2260 | 100 | 0.0036251761 | f
110 | 2280 | 100 | 0.0148704095 | nadir
111 | 2300 | 100 | 0.0013670816 | f
112 | 2320 | 94 | 0.0023807666 | f
113 | 2340 | 98 | 0.0028030989 | f
114 | 2360 | 100 | 0.0011496819 | f
115 | 2380 | 100 | 0.0018590145 | f
116 | 2400 | 100 | 0.0028201419 | f
117 | 2420 | 100 | 0.0006471739 | f
118 | 2440 | 100 | 0.0008409826 | f
119 | 2460 | 100 | 0.0019335396 | f
120 | 2480 | 100 | 0.0026445946 | f
121 | 2500 | 100 | 0.0009412576 | f
122 | 2520 | 100 | 0.0076726343 | ideal
123 | 2540 | 100 | 0.0008107320 | f
124 | 2560 | 100 | 0.0009934158 | f
125 | 2580 | 100 | 0.0524226821 | nadir
126 | 2600 | 98 | 0.0009844465 | f
127 | 2620 | 98 | 0.0026966895 | f
128 | 2640 | 100 | 0.0008883888 | f
129 | 2660 | 100 | 0.0014301705 | f
130 | 2680 | 100 | 0.0076142132 | nadir
131 | 2700 | 100 | 0.0002017442 | f
132 | 2720 | 100 | 0.0007198007 | f
133 | 2740 | 100 | 0.0016718224 | f
134 | 2760 | 100 | 0.0026728754 | f
135 | 2780 | 100 | 0.0016151362 | f
136 | 2800 | 100 | 0.0022241025 | f
137 | 2820 | 100 | 0.0030336740 | f
138 | 2840 | 100 | 0.0050505051 | ideal
139 | 2860 | 100 | 0.0268714302 | nadir
140 | 2880 | 100 | 0.0010057140 | f
141 | 2900 | 100 | 0.0019137692 | f
142 | 2920 | 97 | 0.0038635838 | f
143 | 2940 | 100 | 0.0015447888 | f
144 | 2960 | 100 | 0.0173697270 | nadir
145 | 2980 | 98 | 0.0004471039 | f
146 | 3000 | 100 | 0.0021637838 | f
147 | 3020 | 100 | 0.0206561361 | nadir
148 | 3040 | 99 | 0.0011608718 | f
149 | 3060 | 100 | 0.0015154446 | f
150 | 3080 | 100 | 0.0026167022 | f
151 | 3100 | 100 | 0.0010408804 | f
152 | 3120 | 100 | 0.0023102329 | f
153 | 3140 | 100 | 0.0027312538 | f
154 | 3160 | 100 | 0.0008614075 | f
155 | 3180 | 100 | 0.0016276810 | f
156 | 3200 | 100 | 0.0024373391 | f
157 | 3220 | 100 | 0.0034422574 | f
158 | 3240 | 100 | 0.0001981024 | f
159 | 3260 | 98 | 0.0007960277 | f
160 | 3280 | 99 | 0.0081706265 | nadir
161 | 3300 | 100 | 0.0197999522 | ideal
162 | 3320 | 100 | 0.0008312249 | f
163 | 3340 | 100 | 0.0022827738 | f
164 | 3360 | 100 | 0.0037392494 | f
165 | 3380 | 100 | 0.0001308463 | f
166 | 3400 | 100 | 0.0007492723 | f
167 | 3420 | 100 | 0.0027083995 | f
168 | 3440 | 100 | 0.0006564686 | f
169 | 3460 | 100 | 0.0025567741 | f
170 | 3480 | 100 | 0.0007499838 | f
171 | 3500 | 100 | 0.0110565111 | nadir
172 | 3520 | 100 | 0.0001389302 | f
173 | 3540 | 100 | 0.0010242965 | f
174 | 3560 | 100 | 0.0021465934 | f
175 | 3580 | 100 | 0.0029918921 | f
176 | 3600 | 100 | 0.0014005300 | f
177 | 3620 | 100 | 0.0024915178 | f
178 | 3640 | 100 | 0.0048899756 | ideal
179 | 3660 | 100 | 0.0015034653 | f
180 | 3680 | 100 | 0.0017920622 | f
181 | 3700 | 100 | 0.0024183582 | f
182 | 3720 | 100 | 0.0027043360 | f
183 | 3740 | 100 | 0.0007089840 | f
184 | 3760 | 100 | 0.0012138966 | f
185 | 3780 | 100 | 0.0025570464 | f
186 | 3800 | 100 | 0.0008054274 | f
187 | 3820 | 100 | 0.0022882250 | f
188 | 3840 | 100 | 0.0035998474 | f
189 | 3860 | 100 | 0.0007140725 | f
190 | 3880 | 100 | 0.0017662097 | f
191 | 3900 | 100 | 0.0029680847 | f
192 | 3920 | 100 | 0.0006739590 | f
193 | 3940 | 100 | 0.0031285772 | f
194 | 3960 | 100 | 0.0005582380 | f
195 | 3980 | 100 | 0.0011987784 | f
196 | 4000 | 100 | 0.0327880220 | nadir
197 | 4020 | 100 | 0.0002695098 | f
198 | 4040 | 100 | 0.0003390425 | f
199 | 4060 | 100 | 0.0020008973 | f
200 | 4080 | 100 | 0.1062312128 | nadir
201 | 4100 | 100 | 0.0008695801 | f
202 | 4120 | 100 | 0.0019339729 | f
203 | 4140 | 100 | 0.0025012805 | f
204 | 4160 | 100 | 0.0010486630 | f
205 | 4180 | 100 | 0.0028622917 | f
206 | 4200 | 100 | 0.0007743133 | f
207 | 4220 | 100 | 0.0014922967 | f
208 | 4240 | 100 | 0.0018792328 | f
209 | 4260 | 100 | 0.0029315013 | f
210 | 4280 | 100 | 0.0011491440 | f
211 | 4300 | 100 | 0.0020862560 | f
212 | 4320 | 100 | 0.0036063690 | f
213 | 4340 | 100 | 0.0009308926 | f
214 | 4360 | 100 | 0.0017008290 | f
215 | 4380 | 100 | 0.0027897897 | f
216 | 4400 | 100 | 0.0009931574 | f
217 | 4420 | 100 | 0.0015084632 | f
218 | 4440 | 100 | 0.0031670529 | f
219 | 4460 | 100 | 0.0015754144 | f
220 | 4480 | 100 | 0.0024660479 | f
221 | 4500 | 100 | 0.0030874370 | f
222 | 4520 | 100 | 0.0014035554 | f
223 | 4540 | 100 | 0.0022117284 | f
224 | 4560 | 100 | 0.0029262107 | f
225 | 4580 | 100 | 0.0001492068 | f
226 | 4600 | 100 | 0.0005305552 | f
227 | 4620 | 100 | 0.0014120512 | f
228 | 4640 | 100 | 0.0024328597 | f
229 | 4660 | 100 | 0.0031766545 | f
230 | 4680 | 100 | 0.0100491928 | ideal
231 | 4700 | 100 | 0.0007163366 | f
232 | 4720 | 100 | 0.0021459096 | f
233 | 4740 | 100 | 0.0025205363 | f
234 | 4760 | 100 | 0.0011359025 | f
235 | 4780 | 100 | 0.0016903615 | f
236 | 4800 | 100 | 0.0021719093 | f
237 | 4820 | 100 | 0.0023432097 | f
238 | 4840 | 100 | 0.0025366569 | f
239 | 4860 | 100 | 0.0009831478 | f
240 | 4880 | 100 | 0.0020269592 | f
241 | 4900 | 100 | 0.0029445670 | f
242 | 4920 | 100 | 0.0014039593 | f
243 | 4940 | 100 | 0.0016479206 | f
244 | 4960 | 100 | 0.0017432882 | f
245 | 4980 | 100 | 0.0024965504 | f
246 | 5000 | 100 | 0.0075244161 | nadir
247 | 5020 | 98 | 0.0013514014 | f
248 | 5040 | 100 | 0.0023657877 | f
249 | 5060 | 100 | 0.0075814622 | nadir
250 | 5080 | 100 | 0.0008229083 | f
251 | 5100 | 100 | 0.0018200126 | f
252 | 5120 | 100 | 0.0015781123 | f
253 | 5140 | 100 | 0.0023827060 | f
254 | 5160 | 100 | 0.0028175156 | f
255 | 5180 | 100 | 0.0053076048 | ideal
256 | 5200 | 100 | 0.0010024077 | f
257 | 5220 | 100 | 0.0024020530 | f
258 | 5240 | 100 | 0.0025543578 | f
259 | 5260 | 100 | 0.0049140049 | nadir
260 | 5280 | 100 | 0.0008210233 | f
261 | 5300 | 100 | 0.0014776169 | f
262 | 5320 | 100 | 0.0019401038 | f
263 | 5340 | 99 | 0.0024339817 | f
264 | 5360 | 100 | 0.0488956676 | nadir
265 | 5380 | 100 | 0.0003297820 | f
266 | 5400 | 100 | 0.0004809948 | f
267 | 5420 | 100 | 0.0010137842 | f
268 | 5440 | 100 | 0.0018422106 | f
269 | 5460 | 100 | 0.0095161543 | ideal
270 | 5480 | 100 | 0.0002937348 | f
271 | 5500 | 100 | 0.0012896307 | f
272 | 5520 | 100 | 0.0016395611 | f
273 | 5540 | 100 | 0.0022096387 | f
274 | 5560 | 100 | 0.0029115372 | f
275 | 5580 | 100 | 0.0003208483 | f
276 | 5600 | 100 | 0.0010432496 | f
277 | 5620 | 100 | 0.0109090909 | nadir
278 | 5640 | 100 | 0.0006380572 | f
279 | 5660 | 100 | 0.0012539296 | f
280 | 5680 | 100 | 0.0018869736 | f
281 | 5700 | 100 | 0.0143516819 | nadir
282 | 5720 | 100 | 0.0006321777 | f
283 | 5740 | 100 | 0.0019345380 | f
284 | 5760 | 100 | 0.0033660764 | f
285 | 5780 | 100 | 0.0005689778 | f
286 | 5800 | 100 | 0.0018342685 | f
287 | 5820 | 100 | 0.0023026366 | f
288 | 5840 | 100 | 0.0032465771 | f
289 | 5860 | 100 | 0.0003782252 | f
290 | 5880 | 100 | 0.0006575345 | f
291 | 5900 | 100 | 0.0008099827 | f
292 | 5920 | 100 | 0.0021791783 | f
293 | 5940 | 100 | 0.0020347038 | f
294 | 5960 | 100 | 0.0021456030 | f
295 | 5980 | 100 | 0.0110159119 | nadir
296 | 6000 | 100 | 0.0042670460 | ideal
297 | 6020 | 100 | 0.0003256472 | f
298 | 6040 | 100 | 0.0011075836 | f
299 | 6060 | 100 | 0.0024431312 | f
300 | 6080 | 100 | 0.0029675471 | f
301 | 6100 | 100 | 0.0002832823 | f
302 | 6120 | 100 | 0.0008196136 | f
303 | 6140 | 100 | 0.0015111461 | f
304 | 6160 | 100 | 0.0023438304 | f
305 | 6180 | 100 | 0.0030117987 | f
306 | 6200 | 100 | 0.0006915368 | f
307 | 6220 | 100 | 0.0013023618 | f
308 | 6240 | 100 | 0.0016467663 | f
309 | 6260 | 100 | 0.0028181715 | f
310 | 6280 | 100 | 0.0002174903 | f
311 | 6300 | 100 | 0.0159094831 | nadir
312 | 6320 | 100 | 0.0002233155 | f
313 | 6340 | 100 | 0.0016067357 | f
314 | 6360 | 100 | 0.0113428872 | nadir
315 | 6380 | 100 | 0.0007826532 | f
316 | 6400 | 100 | 0.0015021859 | f
317 | 6420 | 100 | 0.0021639583 | f
318 | 6440 | 100 | 0.0035455709 | f
319 | 6460 | 100 | 0.0004408263 | f
320 | 6480 | 100 | 0.0009008182 | f
321 | 6500 | 100 | 0.0022734879 | f
322 | 6520 | 100 | 0.0028305513 | f
323 | 6540 | 100 | 0.0009522210 | f
324 | 6560 | 100 | 0.0016494359 | f
325 | 6580 | 100 | 0.0017040436 | f
326 | 6600 | 100 | 0.0077918054 | nadir
327 | 6620 | 100 | 0.0011897773 | f
328 | 6640 | 100 | 0.0016125463 | f
329 | 6660 | 100 | 0.0020910395 | f
330 | 6680 | 100 | 0.0025746796 | f
331 | 6700 | 100 | 0.0007270686 | f
332 | 6720 | 100 | 0.0015195218 | f
333 | 6740 | 100 | 0.0278235803 | nadir
334 | 6760 | 100 | 0.0003782784 | f
335 | 6780 | 100 | 0.0016226059 | f
336 | 6800 | 100 | 0.0024017009 | f
337 | 6820 | 100 | 0.0090901063 | nadir
338 | 6840 | 100 | 0.0005576767 | f
339 | 6860 | 100 | 0.0014769350 | f
340 | 6880 | 100 | 0.0016449498 | f
341 | 6900 | 100 | 0.0024713485 | f
342 | 6920 | 100 | 0.0032312052 | f
343 | 6940 | 100 | 0.0167410265 | nadir
344 | 6960 | 100 | 0.0012996546 | f
345 | 6980 | 100 | 0.0170260602 | nadir
346 | 7000 | 100 | 0.0011976013 | f
347 | 7020 | 100 | 0.0014380863 | f
348 | 7040 | 100 | 0.0024877771 | f
349 | 7060 | 100 | 0.0024301627 | f
350 | 7080 | 100 | 0.0026983284 | f
351 | 7100 | 100 | 0.0003606302 | f
352 | 7120 | 100 | 0.0011960733 | f
353 | 7140 | 100 | 0.0019512087 | f
354 | 7160 | 100 | 0.0036031599 | nadir
355 | 7180 | 100 | 0.0009421336 | f
356 | 7200 | 100 | 0.0014768857 | f
357 | 7220 | 100 | 0.0022113209 | f
358 | 7240 | 100 | 0.0024686798 | f
359 | 7260 | 100 | 0.0041844409 | f
360 | 7280 | 100 | 0.0007192559 | f
361 | 7300 | 100 | 0.0015899583 | f
362 | 7320 | 100 | 0.0026292431 | f
363 | 7340 | 100 | 0.0009527065 | f
364 | 7360 | 100 | 0.0023277191 | f
365 | 7380 | 100 | 0.0025602201 | f
366 | 7400 | 100 | 0.0004757329 | f
367 | 7420 | 100 | 0.0009509803 | f
368 | 7440 | 100 | 0.0012359725 | f
369 | 7460 | 100 | 0.0012359725 | f
370 | 7480 | 100 | 0.0020690394 | f
371 | 7500 | 100 | 0.0030688883 | f
372 | 7520 | 100 | 0.0005905618 | f
373 | 7540 | 100 | 0.0012236653 | f
374 | 7560 | 100 | 0.0021762875 | f
375 | 7580 | 100 | 0.0024757225 | f
376 | 7600 | 100 | 0.0030260195 | f
377 | 7620 | 100 | 0.0010453779 | f
378 | 7640 | 100 | 0.0028294560 | f
379 | 7660 | 100 | 0.0008431329 | f
380 | 7680 | 100 | 0.0011670264 | f
381 | 7700 | 100 | 0.0015683880 | f
382 | 7720 | 100 | 0.0019416665 | f
383 | 7740 | 100 | 0.0026499131 | f
384 | 7760 | 100 | 0.0007022859 | f
385 | 7780 | 100 | 0.0009237101 | f
386 | 7800 | 100 | 0.0021361051 | f
387 | 7820 | 100 | 0.0025407571 | f
388 | 7840 | 100 | 0.0001308940 | f
389 | 7860 | 100 | 0.0008044308 | f
390 | 7880 | 100 | 0.0013562003 | f
391 | 7900 | 100 | 0.0017308013 | f
392 | 7920 | 100 | 0.0024013220 | f
393 | 7940 | 100 | 0.0028098044 | f
394 | 7960 | 100 | 0.0002567657 | f
395 | 7980 | 100 | 0.0006284255 | f
396 | 8000 | 100 | 0.0012878252 | f
397 | 8020 | 100 | 0.0013628608 | f
398 | 8040 | 100 | 0.0055380328 | nadir
399 | 8060 | 100 | 0.0006003113 | f
400 | 8080 | 100 | 0.0010546091 | f
401 | 8100 | 100 | 0.0009835451 | f
402 | 8120 | 100 | 0.0012451618 | f
403 | 8140 | 100 | 0.0015852418 | f
404 | 8160 | 100 | 0.0016876756 | f
405 | 8180 | 100 | 0.0021492940 | f
406 | 8200 | 100 | 0.0024966693 | f
407 | 8220 | 100 | 0.0030337463 | f
408 | 8240 | 100 | 0.0018860295 | f
409 | 8260 | 100 | 0.0032175246 | f
410 | 8280 | 100 | 0.0011029264 | f
411 | 8300 | 100 | 0.0015949626 | f
412 | 8320 | 100 | 0.0030411376 | f
413 | 8340 | 100 | 0.0006455306 | f
414 | 8360 | 100 | 0.0010801287 | f
415 | 8380 | 100 | 0.0020144444 | f
416 | 8400 | 100 | 0.0024073664 | f
417 | 8420 | 100 | 0.0031172397 | f
418 | 8440 | 100 | 0.0005710727 | f
419 | 8460 | 100 | 0.0011122864 | f
420 | 8480 | 100 | 0.0022796814 | f
421 | 8500 | 100 | 0.0020510317 | f
422 | 8520 | 100 | 0.0027308887 | f
423 | 8540 | 100 | 0.0014657609 | f
424 | 8560 | 100 | 0.0018272361 | f
425 | 8580 | 100 | 0.0026311312 | f
426 | 8600 | 100 | 0.0165753486 | ideal
427 | 8620 | 100 | 0.0054760619 | nadir
428 | 8640 | 100 | 0.0005193119 | f
429 | 8660 | 100 | 0.0013459088 | f
430 | 8680 | 100 | 0.0023148639 | f
431 | 8700 | 100 | 0.0025461306 | f
432 | 8720 | 100 | 0.0005234013 | f
433 | 8740 | 100 | 0.0017194820 | f
434 | 8760 | 100 | 0.0023983429 | f
435 | 8780 | 100 | 0.0022632854 | f
436 | 8800 | 100 | 0.0026650966 | f
437 | 8820 | 100 | 0.0005005771 | f
438 | 8840 | 100 | 0.0010525363 | f
439 | 8860 | 100 | 0.0019397062 | f
440 | 8880 | 100 | 0.0025606293 | f
441 | 8900 | 100 | 0.0008085914 | f
442 | 8920 | 100 | 0.0016483399 | f
443 | 8940 | 100 | 0.0020092166 | f
444 | 8960 | 100 | 0.0019535993 | f
445 | 8980 | 100 | 0.0022133913 | f
446 | 9000 | 100 | 0.0021382748 | f
447 | 9020 | 100 | 0.0025587124 | f
448 | 9040 | 100 | 0.0007370084 | f
449 | 9060 | 100 | 0.0014084988 | f
450 | 9080 | 100 | 0.0026125291 | f
451 | 9100 | 100 | 0.0009579903 | f
452 | 9120 | 100 | 0.0017569206 | f
453 | 9140 | 100 | 0.0019840558 | f
454 | 9160 | 100 | 0.0024002859 | f
455 | 9180 | 100 | 0.0030808622 | f
456 | 9200 | 100 | 0.0002702860 | f
457 | 9220 | 100 | 0.0003230537 | f
458 | 9240 | 100 | 0.0011587346 | f
459 | 9260 | 100 | 0.0016820211 | f
460 | 9280 | 100 | 0.0017063738 | f
461 | 9300 | 100 | 0.0021860904 | f
462 | 9320 | 100 | 0.0026708949 | f
463 | 9340 | 100 | 0.0002090598 | f
464 | 9360 | 100 | 0.0007318818 | f
465 | 9380 | 100 | 0.0010357947 | f
466 | 9400 | 100 | 0.0019644443 | f
467 | 9420 | 100 | 0.0023897740 | f
468 | 9440 | 100 | 0.0021064322 | f
469 | 9460 | 100 | 0.0024230698 | f
470 | 9480 | 100 | 0.0028042277 | f
471 | 9500 | 100 | 0.0140518375 | ideal
472 | 9520 | 100 | 0.0007738034 | f
473 | 9540 | 100 | 0.0013821303 | f
474 | 9560 | 100 | 0.0018288185 | f
475 | 9580 | 100 | 0.0031318476 | f
476 | 9600 | 100 | 0.0007011751 | f
477 | 9620 | 100 | 0.0009437615 | f
478 | 9640 | 100 | 0.0021888502 | f
479 | 9660 | 100 | 0.0028657859 | f
480 | 9680 | 100 | 0.0012487209 | f
481 | 9700 | 100 | 0.0016981918 | f
482 | 9720 | 100 | 0.0019895151 | f
483 | 9740 | 100 | 0.0021550023 | f
484 | 9760 | 100 | 0.0034146478 | f
485 | 9780 | 100 | 0.0003210620 | f
486 | 9800 | 100 | 0.0011354892 | f
487 | 9820 | 100 | 0.0015977890 | f
488 | 9840 | 100 | 0.0023210344 | f
489 | 9860 | 100 | 0.0031707110 | f
490 | 9880 | 100 | 0.0013031596 | f
491 | 9900 | 100 | 0.0017447339 | f
492 | 9920 | 100 | 0.0021822949 | f
493 | 9940 | 100 | 0.0021822949 | f
494 | 9960 | 100 | 0.0023521848 | f
495 | 9980 | 100 | 0.0033130044 | f
496 | 10000 | 100 | 0.0003819641 | f
497 | 10020 | 100 | 0.0005206358 | f
498 | 10040 | 100 | 0.0010606473 | f
499 | 10060 | 100 | 0.0013798210 | f
500 | 10080 | 100 | 0.0017984435 | f
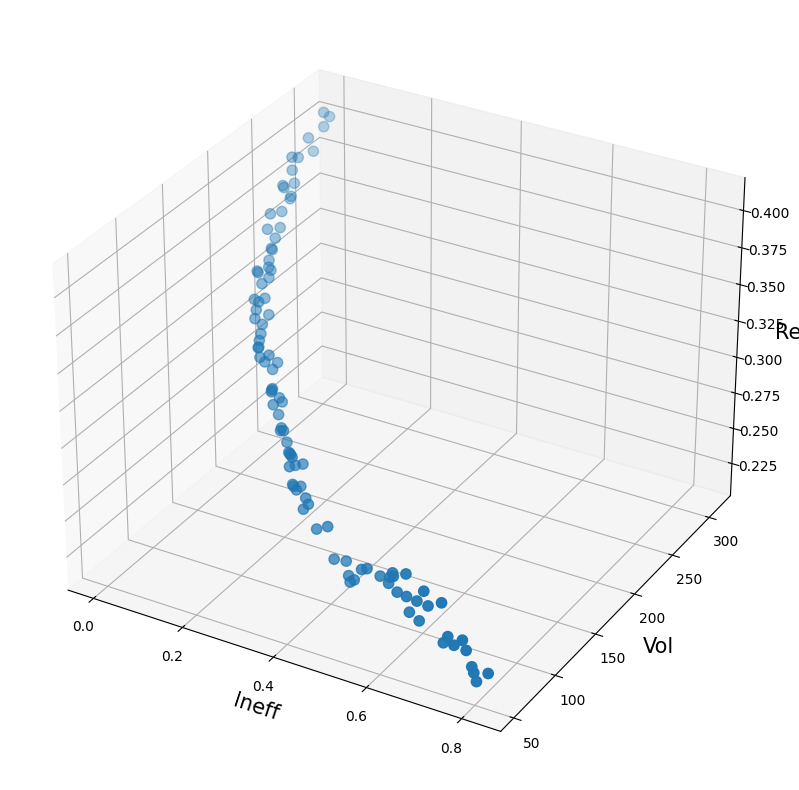
Analysis of Results#
import plotly.express as px
fig = px.scatter_3d(x = res.F[:, 0], y = res.F[:, 1], z = res.F[:, 2], labels={
"x": "InEfficiency",
"y": "Volume",
"z": "Resolution"
},width = 800, height = 800, title = "Final Call feasible solutions")
fig.update_traces(marker=dict(size=8,
line=dict(width=2,
color='DarkSlateGrey')),
selector=dict(mode='markers'))
fig.show()
# Making a animation of evolution
import pandas as pd
obj1 = []
obj2 = []
obj3 = []
calls = []
for r in res.history:
objs = r.pop.get("F")
obj1.extend(objs[:, 0])
obj2.extend(objs[:, 1])
obj3.extend(objs[:, 2])
calls.extend([r.n_gen]*len(objs))
df = pd.DataFrame(data = {"InEfficiency": obj1, "Volume": obj2,
"Resolution": obj3, "n_gen": calls})
obj_fig = px.scatter_3d(df, x="InEfficiency", y="Volume", z = "Resolution",
animation_frame="n_gen", color="n_gen",
range_x=[0., 0.6], range_y=[0. , 400.], range_z=[0., 0.6],
hover_data = df.columns,
width = 800, height = 800)
obj_fig.update(layout_coloraxis_showscale=False)
obj_fig.layout.updatemenus[0].buttons[0].args[1]["frame"]["duration"] = 10
obj_fig.update_layout(transition = {'duration': 0.001})
obj_fig.show()
len(res.F[:,0])
55
import matplotlib.pyplot as plt
fig = plt.figure(figsize = (12, 10))
ax = fig.add_subplot(projection='3d')
ax.scatter(res.F[:, 0], res.F[:, 1], res.F[:, 2], marker = "o", s = 55)
ax.set_xlabel('Ineff', fontsize = 15)
ax.set_ylabel('Vol', fontsize = 15)
ax.set_zlabel('Res', fontsize = 15)
plt.show()
Exercise 3#
Determine the Pareto set from the 3D front and choose an optimal point
Plot the optimal configuration of the tracker corresponding to that point
Do analysis of convergence
Visualize the point with a radar or petal diagram, following https://pymoo.org/visualization/index.html